Land Mobile | Planar antenna aperture
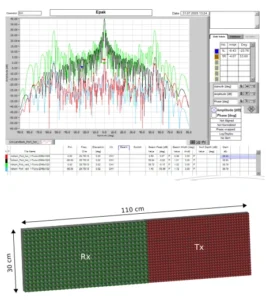
- Specification of the aperture area with the aim of minimizing the overall height of the system
- The form factor significantly determines antenna gain and antenna radiation pattern
- Determination of 15 Tx modules and 8 Rx modules, resulting in dimensions of 110cm x 30cm
- Specification of electrical and mechanical interfaces
- Coordination with the aperture supplier (technical, commercial, and logistical)
- Development, manufacturing, assembly, and measurement of the aperture modules
Land Mobile | EBF Implementation
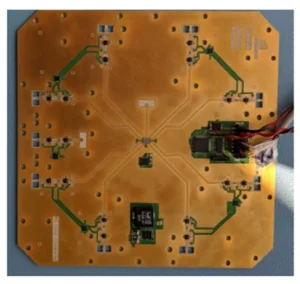
- Active implementation of the Rx aperture to achieve electronic beamforming
- Beam steering through adjustable phase shifts of the 8 Rx sub-modules
- Integration of EBF (Electronic Beamforming) functionality into the antenna aperture and coordination regarding mechanical and electrical interfaces
- Development of high-level drivers for beam steering by a few tenths of a degree by the subcontractor IMST
- Examination of the effects on the antenna radiation pattern in both co-polar and cross-polar planes and optimization as necessary
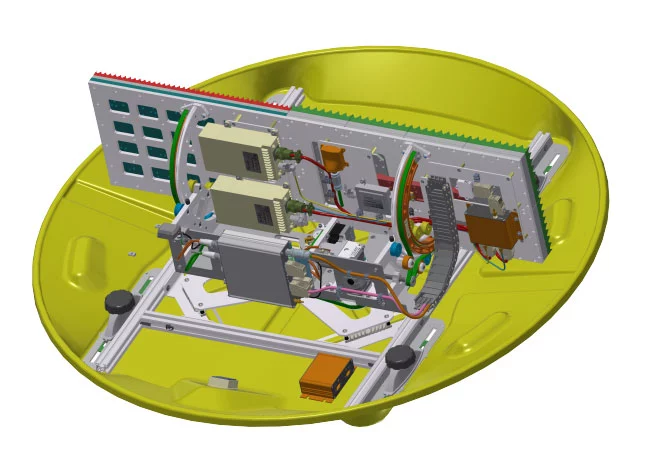
Land Mobile | Mechanical design
- Implementation of the planar aperture at optimal suspension points for minimum radome size
- Removal of the roll axis to reduce body height and weight
- Inclusion of results derived from vibration tests (e.g. use of closed profiles; preference for bolted over riveted connections).
- Development of a cabling concept for the revised prototype mechanics
- Generation of the individual part manufacturing data from the revised 3D design
- Selection of suitable manufacturers as well as data exchange and coordination of offers
- Assembly of subassemblies from supplied parts and their verification
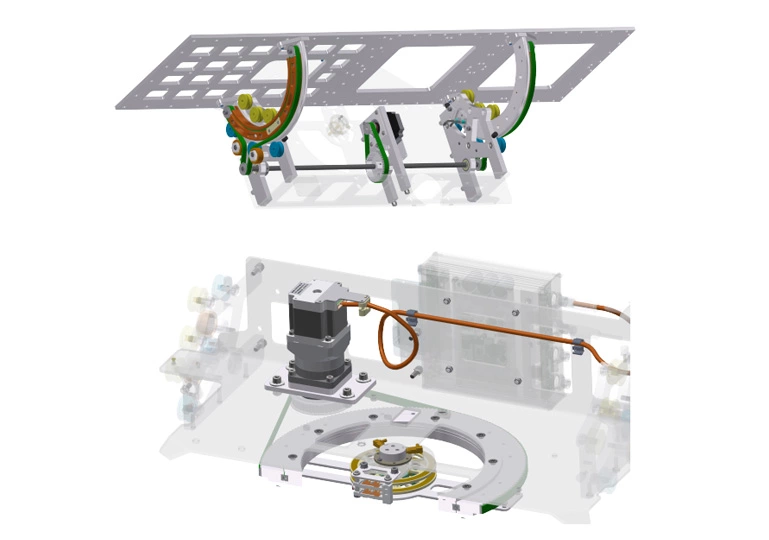
Drive
Elevation module:
- Drive via semi-circular roller track
- Drive arches on the back of the aperture
- 2-stage toothed belt drive
- Drive on both sides via central, rigid drive shaft
Azimuth Module:
- Planetary gear and transmission belt with large gear and flat bearing with large hollow shaft
- Stepping motor
- 2-channel rotary joint in U-configuration
- Slip rings
Land Mobile | Radome
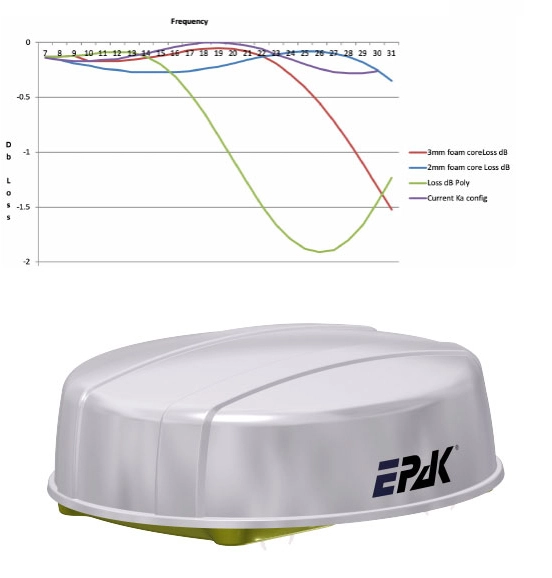
- Main task: Protecting the antenna system from environmental influences
- Compromise of mechanical stability, electromagnetic losses and production costs
- Selection of the basic material composition and measurement of selected layer structures
- Determination of the radome set-up after mechanical and metrological evaluation of the candidates in question.
- Adaptation of the radome construction to the final mechanical design and to the chosen manufacturing process
- Generation of CAD data for toolmaking
- Coordination of toolmaking and sample production
- Metrological evaluation of the prototype radome
Land Mobile | System control

- Replacement of the combination of satellite tuner and DVB-S2 demodulator by integrated satellite tuner with DVB-S2X demodulator
- Integration of a second signal processing path consisting of baseband converter, analogue filter stage, high-speed ADC and FPGA for the implementation of pure power-level based tracking
- 10 MHz continuity in the Rx signal path
- Load and temperature tests with ambient temperatures up to 55°C
- No failures detected in the tested electronics during vibration and shock tests
- Integration of a ventilation system inside the electronics
- Extension of the electronics by an RS485 interface to control the active part of the planar aperture
Landmobil | Stromversorgung
- 19″ 1 U form factor for the indoor units
- Further development of the power electronics for generating the voltages of BUC and ODU
- Vibration and shock tests carried out showed no failures or malfunctions of the power electronics
- Extension of the display options in the web interface and display to include diagnostic values from environmental sensors and power supply monitoring
- Selection of a 19 inch 1U rack inverter with 12 V / 24 V input and 220 V / 50 Hz true sine wave output to supply modem, ACU and ODU
- Function test of the inverter in connection with online UPS and other consumers in the laboratory and in the car
- Environmental tests with all components
Land Mobile | Polarizer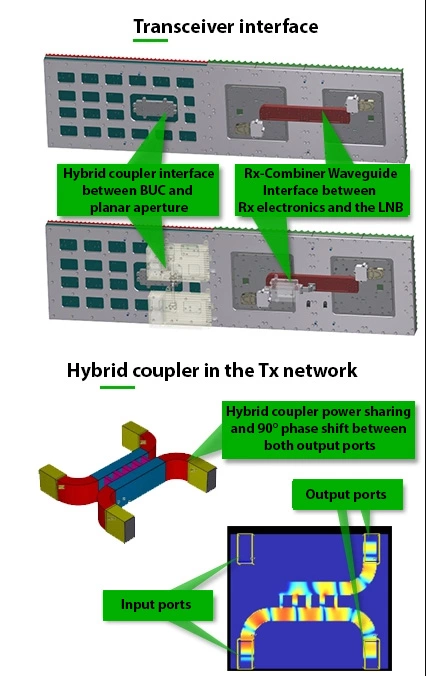
- Connection of BUC and LNB to planar aperture
- Design of a waveguide combiner to transmit the output signals of the active Rx electronics to the LNB
- Realisation of circular polarisation in the receive path by means of programmable phase shifting of the two orthogonal waveguide feeds
- Development of a hybrid coupler for feeding the Tx aperture and generating the circular polarisation
- Optimisation of the hybrid coupler to compensate for existing differences in the phase delays of the waveguide networks
- Construction of the mounting concept in coordination with the aperture supplier
- Testing of the feed network of the Rx aperture
- Implementation of high-level functions for polarization selection in the Rx path
Land Mobile | High-speed 3D-Sensor-Module
- Confirmation of the specification and sizing of the hardware for the Inertial Sensor Module
- Revision of the tracking algorithm
- Design of an extended Kalman filter and its implementation into the sensor module
- To offload the system control, the calculation of target angles is done directly in the sensor module
- Integration of a Second Stage Bootloader and support for encrypted Over-The-Air updates
- Software development for conducting fully automated temperature calibrations
- Adjustment of target angle calculations for the modified axis arrangement of the positioner
- Verification of the optimized assembly on the motion simulator and in a motor vehicle.