a novel 3D-imaging sensor based on MIMO radar technology
3D-MIMO-Radar-System
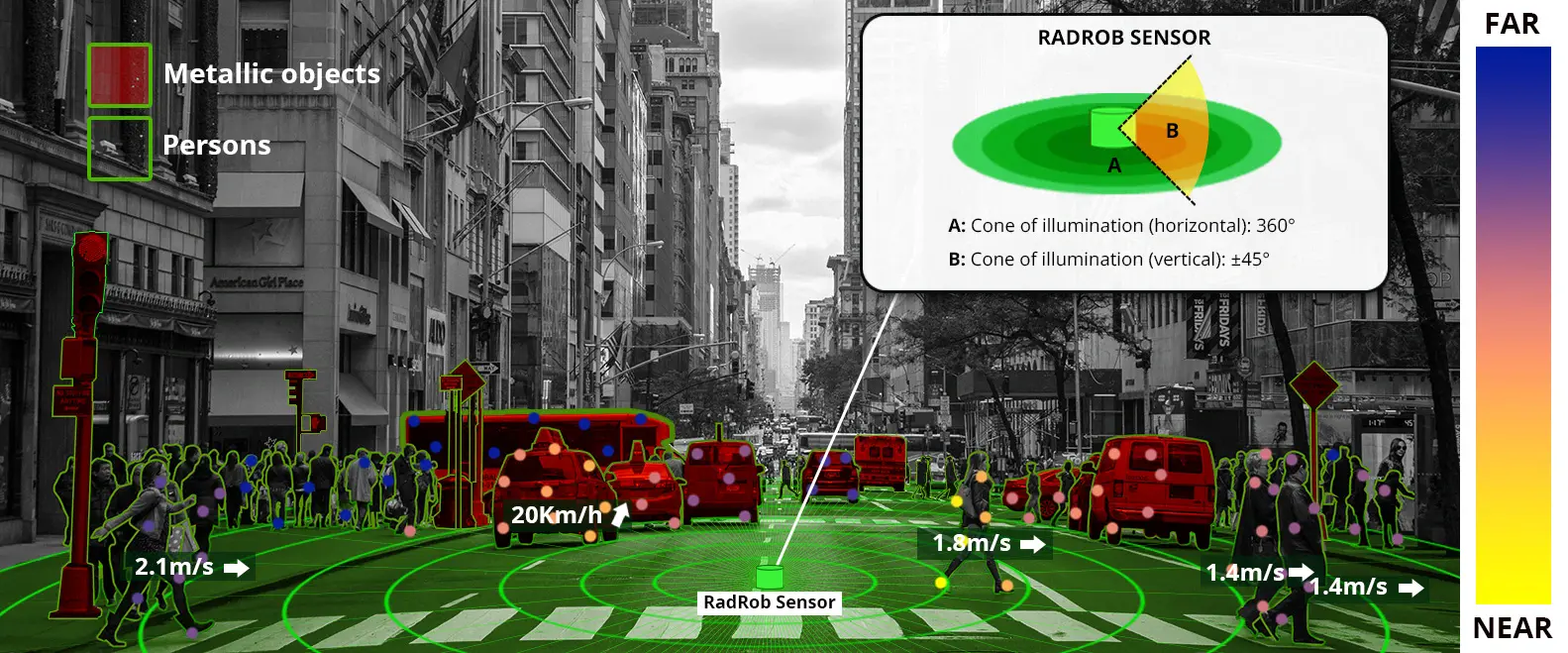
a novel 3D-imaging sensor based on MIMO radar technology.
The radar can distinguish between metallic objects and people and measure the speed and direction of their movement.
At the same time, it monitors 360° of the environment.
The integration of holography and secondary radar principles enable a wide range of applications: from documenting critical processes to monitoring the work areas of autonomously acting robots to allow them to operate in the work area shared with humans.
RadRob 3D-Imaging Sensors: Key Factors
Exact detection of position and movement of persons (position better than 5 mm, max. speed 5 m/s, latency time less than 1 ms)
Position determination of “smart objects” (accuracy better than 5 mm without time offset)
Resolution: < 1 mm
Field of view: 360° horizontal, ±45° vertical
Tagging through secondary radar principle with passive tags
Project Description
Sensors for environmental monitoring of mobile and/or autonomous systems are becoming increasingly important in the coming years. On the commercial level, such systems typically operate in restricted areas. Within this project, the emphasis is on mobile robots for indoor applications.
In the research world, individual robots are mainly developed for home automation and healthcare applications, which are already being evaluated on humans. However, these robots usually exhibit:
a) Very cost-intensive systems, with the sensors and computational power being the main cost drivers.
b) At the same time, these systems have low force application capabilities. This means that in case of a disturbance, people should not be harmed.
Especially in industrial robotics, cost and high force application are crucial factors because force often correlates with the accuracy of the system when handling heavy loads.
The focus within this project is precisely on industrial robotics.
Sensors needed for industrial robots and to be developed within this project are called 3D imaging sensors. They enable continuous monitoring of the entire environment.
RadRob 3D-Imaging Sensors: the Pros
There are three different competing sensor technologies on the market today, which are also used in robotic systems (stereo camera systems, LiDAR, radar systems).
Stereo-camera-System
LiDAR
Radar-Sensor
RadRob
Sample system:
Microsoft Kinect
sample system:
MRS6000
Sample system:
LRR4
AiM of the project
Auflösung
Resolution
2 mm @ 2 m
> 1 mm
> 10 mm
> 1 mm
Latenz
Latency
<10 ms
<100 ms
10 ms
< 1 ms
Position Bestimmung von Gegenständen
Position determination of objects
Not possible
Not possible
Not possible
Possible with an accuracy of 5 mm
Field of view
Field of view
58°
120° (horizontal) 15°(vertical)
120°
360° (horizontal) 45°(vertical)
Kosten
Costs
50 €
6.500 €
120 €
< 1000 €
Quelle
Source
[1]
[2]
[3]
[1] „researchgate,“ [Online]. Available: https://www.researchgate.net/figure/The-Microsoft-Kinect-3D-Camera-Sensor-System-an-IR-transmitter-3D-Depth-Sensors_fig15_309740491. [Zugriff am 05 03 2021]. [2] P. Boulay und A. Debray, „LiDAR for Automtive and Industrial Applications,“ Yole Developpement, France, 2020. [3] „bosch,“ [Online]. Available: https://www.bosch-mobility-solutions.com/en/products-and-services/passenger-cars-and-light-commercial-vehicles/driver-assistance-systems/automatic-emergency-braking/long-range-radar-sensor/. [Zugriff am 11 03 2021].
None of the existing sensor systems mentioned above meet the requirements defined in the previous section. Therefore, a novel sensor is intended to be developed within this project. In contrast to optical sensors (camera, LiDAR), radar sensors typically operate effectively even in unfavorable lighting conditions.
Fig. 1: Schematic representation of the project idea for an autonomous robotics system
The radar system is positioned mechanically or by means of magnets directly on the robot and several radar sensors can be combined with each other through calibration. Using the shape of a cylinder with a triangular base, the sensor can detect the 360°, with each radar system covering approx. 120° (horizontal axis).
To calculate the required angular separation capability, a simple consideration was made, which can be seen in Figure 2:Fig. 2: Resolution calculation
RadRob 3D-Imaging Sensors: Possible future areas of application for the technology
The 3D MIMO radar system can also be effectively utilized in many other areas:
Automotive industry
Smart motion detectors
Robots with shared workspace between humans and robots
Conventional passenger vehicles (e.g., Mercedes S-Class Drive Pilot, also in mid-range vehicles)
Golf radar sensors
This versatile radar technology has applications across a wide range of industries and use cases, thanks to its ability to provide reliable sensing and detection capabilities even in challenging environments and lighting conditions.
Möchten Sie in Kontakt bleiben?
Schreiben Sie uns oder folgen Sie EANT auf LinkedIn
To provide the best experiences, we use technologies like cookies to store and/or access device information. Consenting to these technologies will allow us to process data such as browsing behavior or unique IDs on this site. Not consenting or withdrawing consent, may adversely affect certain features and functions.
Functional
Always active
The technical storage or access is strictly necessary for the legitimate purpose of enabling the use of a specific service explicitly requested by the subscriber or user, or for the sole purpose of carrying out the transmission of a communication over an electronic communications network.
Preferences
The technical storage or access is necessary for the legitimate purpose of storing preferences that are not requested by the subscriber or user.
Statistics
The technical storage or access that is used exclusively for statistical purposes.The technical storage or access that is used exclusively for anonymous statistical purposes. Without a subpoena, voluntary compliance on the part of your Internet Service Provider, or additional records from a third party, information stored or retrieved for this purpose alone cannot usually be used to identify you.
Marketing
The technical storage or access is required to create user profiles to send advertising, or to track the user on a website or across several websites for similar marketing purposes.
 The radar can distinguish between metallic objects and people and measure the speed and direction of their movement.
At the same time, it monitors 360° of the environment.
The integration of holography and secondary radar principles enable a wide range of applications: from documenting critical processes to monitoring the work areas of autonomously acting robots to allow them to operate in the work area shared with humans.
The radar can distinguish between metallic objects and people and measure the speed and direction of their movement.
At the same time, it monitors 360° of the environment.
The integration of holography and secondary radar principles enable a wide range of applications: from documenting critical processes to monitoring the work areas of autonomously acting robots to allow them to operate in the work area shared with humans. 
