ein neuartiger 3D-Imaging-Sensor auf der Grundlage von MIMO-Radar-Technologie
3D-MIMO-Radar-System
ein neuartiger 3D-Imaging-Sensor auf der Grundlage von MIMO-Radar-Technologie
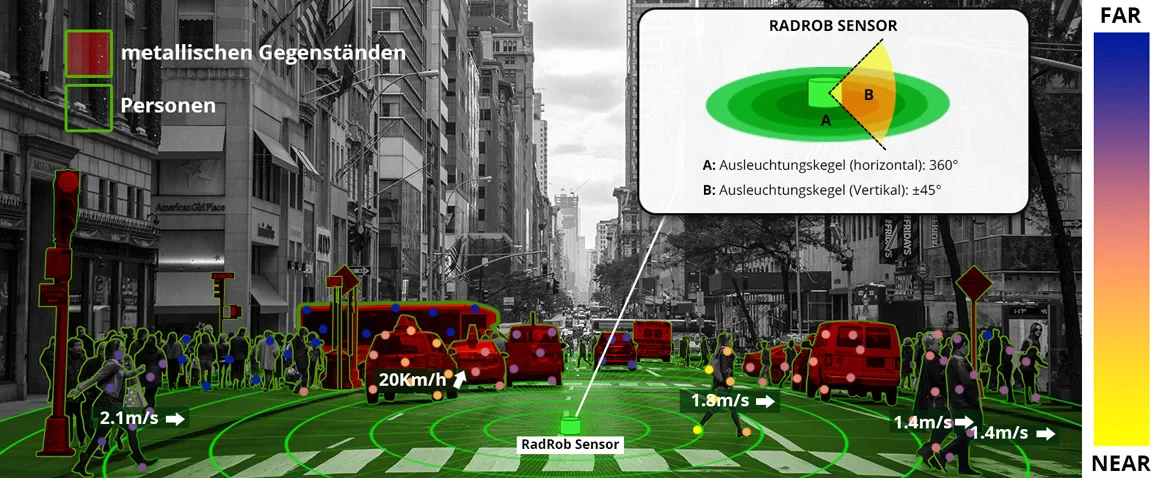
Das Radar kann zwischen metallischen Gegenständen und Personen unterscheiden und die Geschwindigkeit und Richtung ihrer Bewegung messen.
Gleichzeitig überwacht es 360° der Umgebung.
Die Integration von Holografie und Sekundar-Radar-Prinzipien ermöglichen vielfältige Anwendungen: angefangen von der Dokumentation kritischer Abläufe bis hin zur Überwachung von Arbeitsbereichen autonom agierender Roboter, um diesen die Operation im mit Menschen geteilten Arbeitsbereich zu erlauben.
RadRob 3D-Imaging-Sensoren: Key Factors
Exakte Erkennung von Position und Bewegung von Personen (Position besser als 5 mm, max. Geschwindigkeit 5 m/s, Latenzzeit kleiner 1 ms)
Positionsbestimmung von „Smarten Gegenständen“ (Genauigkeit besser als 5 mm ohne Zeitversatz)
Auflösung: < 1 mm
Sichtfeld: 360° horizontal, ±45° vertikal
Tagging durch Sekundär-Radar-Prinzip mit passiven Tags
Projektbeschreibung
Sensoren für die Umgebungsüberwachung von beweglichen und/oder autonomen Systemen werden in den nächsten Jahren immer wichtiger. Auf kommerzieller Ebene fahren bzw. bewegen sich solche Systeme nur in abgesperrten Bereichen. Innerhalb dieses Projekts liegt der Schwerpunkt auf mobilen Robotern für Indoor Anwendungen.
In der Forschungswelt werden einzelne solcher Roboter vor allem im Bereich der Home-Automatisierung bzw. der Pflege-Anwendung entwickelt, welche heute schon an Menschen evaluiert werden. Bei diesen Robotern handelt sich aber in der Regel um:
a) Sehr kostenintensive Systeme, wobei die Sensorik sowie die Rechenleistung den Kostentreiber ausmachen
b) Gleichzeitig zeichnen sich die Systeme durch eine geringe Kraftumsetzung aus. Das heißt, im Störfall sollen die Personen nicht verletzt werden.
Vor allem in der Industrie-Robotik spielen aber vor allem die Kosten sowie eine hohe Kraftumsetzung eine entscheidende Rolle, weil mit der Kraft meistens auch die Genauigkeit des Systems bei großen Lasten einhergeht.
Der Fokus innerhalb dieses Projekts liegt genau auf der Industrie-Robotik.
Sensoren, welche für Industrie-Robotern benötigt werden und innerhalb dieses Projekt entwickelt werden sollen, sind sogenannte 3D-Imaging-Sensoren. Sie ermöglichen eine dauerhafte Überwachung der gesamten Umgebung.
RadRob 3D-Imaging-Sensoren: die Vorteile
Am Markt existieren heute drei verschiedene konkurrierende Sensortechnologien, welche auch schon bei Roboter-Systemen (Stereo-Kamera Systeme, LiDAR, Radar-Systeme) eingesetzt werden.
Stereo-Kamera-System
LiDAR
Radar-Sensor
RadRob
Beispielsystem:
Microsoft Kinect
Beispielsystem:
MRS6000
Beispielsystem:
LRR4
Ziel des Projekts
Auflösung
Auflösung
2 mm @ 2 m
> 1 mm
> 10 mm
> 1 mm
Latenz
Latenz
Kleiner 10 ms
Kleiner 100 ms
10 ms
< 1 ms
Position Bestimmung von Gegenständen
Position Bestimmung von Gegenständen
Nicht möglich
Nicht möglich
Nicht möglich
Möglich mit Genauigkeit von 5 mm
Field of view
Field of view
58°
120° (horizontal) 15°(vertikal)
120°
360° (horizontal) 45°(vertikal)
Kosten
Kosten
50 €
6.500 €
120 €
< 1000 €
Quelle
Quelle
[1]
[2]
[3]
[1] „researchgate,“ [Online]. Available: https://www.researchgate.net/figure/The-Microsoft-Kinect-3D-Camera-Sensor-System-an-IR-transmitter-3D-Depth-Sensors_fig15_309740491. [Zugriff am 05 03 2021]. [2] P. Boulay und A. Debray, „LiDAR for Automtive and Industrial Applications,“ Yole Developpement, France, 2020. [3] „bosch,“ [Online]. Available: https://www.bosch-mobility-solutions.com/en/products-and-services/passenger-cars-and-light-commercial-vehicles/driver-assistance-systems/automatic-emergency-braking/long-range-radar-sensor/. [Zugriff am 11 03 2021].
Keines der bisherigen Sensorsysteme erfüllt aber die im vorherigen Abschnitt definierten Anforderungen; aus diesem Grund soll innerhalb dieses Projekts ein neuartiger Sensor entwickelt werden. Im Gegensatz zu optischen Sensoren (Kamera, Lidar), arbeiten Radar-Sensoren in der Regel auch bei ungünstigen Lichtverhältnissen.
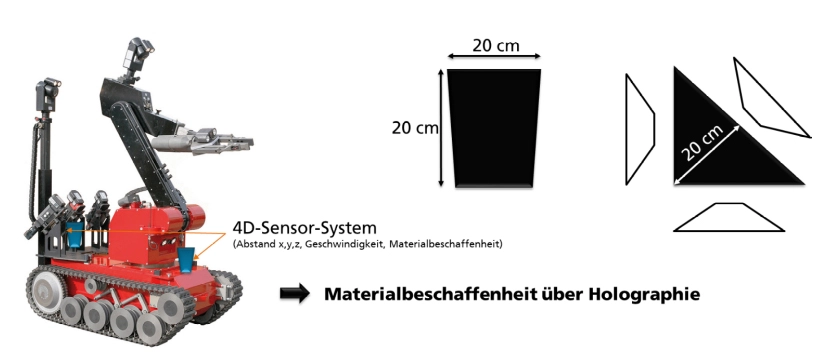
Abbildung 1: Schematische Darstellung der Projektidee für ein autonomes Robotik System
Das Radarsystem wird mechanisch bzw. mittels Magneten direkt auf dem Roboter positioniert und mehrere Radar-Sensoren können durch eine Kalibrierung miteinander kombiniert werden. Über die Form eines Zylinders mit dreieckiger Grundform kann der Sensor die 360° erfassen, wobei jedes Radarsystem ca. 120° (Horizontale Achse) abdeckt.
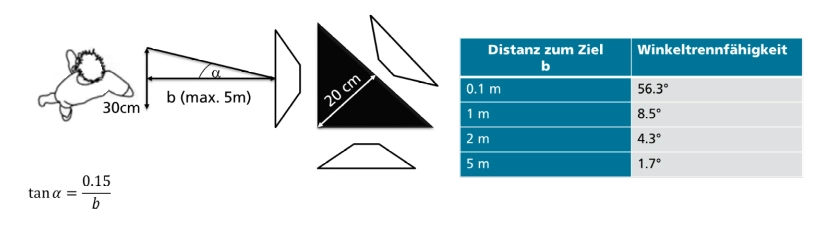
Zur Berechnung der benötigten Winkeltrennfähigkeit wurde eine einfache Überlegung durchgeführt, welche in Abbildung 2 zu sehen ist:
Abbildung 2: Berechnung der Auflösung
RadRob 3D-Imaging-Sensoren: mögliche künftige Einsatzgebiete der Technologie
Das 3D-MIMO-Radar- System kann auch in vielen anderen Bereichen wirksam eingesetzt werden:
Automobil
smarter Bewegungsmelder
Roboter mit gemeinsamem Arbeitsbereich von Mensch und Roboter
Um Ihnen ein optimales Erlebnis zu bieten, verwenden wir Technologien wie Cookies, um Geräteinformationen zu speichern und/oder darauf zuzugreifen. Wenn Sie diesen Technologien zustimmen, können wir Daten wie das Surfverhalten oder eindeutige IDs auf dieser Website verarbeiten.
Functional
Always active
Die technische Speicherung oder der Zugang ist unbedingt erforderlich für den rechtmäßigen Zweck, die Nutzung eines bestimmten, vom Teilnehmer oder Nutzer ausdrücklich gewünschten Dienstes zu ermöglichen, oder für den alleinigen Zweck, die Übertragung einer Nachricht über ein elektronisches Kommunikationsnetz durchzuführen.
Einstellungen
Die technische Speicherung oder der Zugriff ist für den rechtmäßigen Zweck der Speicherung von Präferenzen erforderlich, die nicht vom Abonnenten oder Benutzer angefordert werden.
Statistics
The technical storage or access that is used exclusively for statistical purposes.Die technische Speicherung oder der Zugriff, der ausschließlich zu anonymen statistischen Zwecken verwendet wird. Ohne eine Vorladung, die freiwillige Zustimmung Ihres Internetdienstanbieters oder zusätzliche Aufzeichnungen von Dritten können die zu diesem Zweck gespeicherten oder abgerufenen Informationen allein in der Regel nicht zu Ihrer Identifizierung verwendet werden.
Marketing
Die technische Speicherung oder der Zugriff ist erforderlich, um Nutzerprofile zu erstellen, um Werbung zu versenden oder um den Nutzer auf einer Website oder über mehrere Websites hinweg zu ähnlichen Marketingzwecken zu verfolgen.
 Das Radar kann zwischen metallischen Gegenständen und Personen unterscheiden und die Geschwindigkeit und Richtung ihrer Bewegung messen.
Gleichzeitig überwacht es 360° der Umgebung.
Die Integration von Holografie und Sekundar-Radar-Prinzipien ermöglichen vielfältige Anwendungen: angefangen von der Dokumentation kritischer Abläufe bis hin zur Überwachung von Arbeitsbereichen autonom agierender Roboter, um diesen die Operation im mit Menschen geteilten Arbeitsbereich zu erlauben.
Das Radar kann zwischen metallischen Gegenständen und Personen unterscheiden und die Geschwindigkeit und Richtung ihrer Bewegung messen.
Gleichzeitig überwacht es 360° der Umgebung.
Die Integration von Holografie und Sekundar-Radar-Prinzipien ermöglichen vielfältige Anwendungen: angefangen von der Dokumentation kritischer Abläufe bis hin zur Überwachung von Arbeitsbereichen autonom agierender Roboter, um diesen die Operation im mit Menschen geteilten Arbeitsbereich zu erlauben.